Loading...
Searching...
No Matches
examples/io/external-viewers/polyscope/exampleGenericLatticeConvexHull4D.cpp
Computes the convex hull of N 4D points within a ball of radius R, these points belonging to a lattice of chosen dimension D. Displays their projections along the different main axes.
./examples/io/external-viewers/polyscope/exampleGenericLatticeConvexHull4D 20 100 2
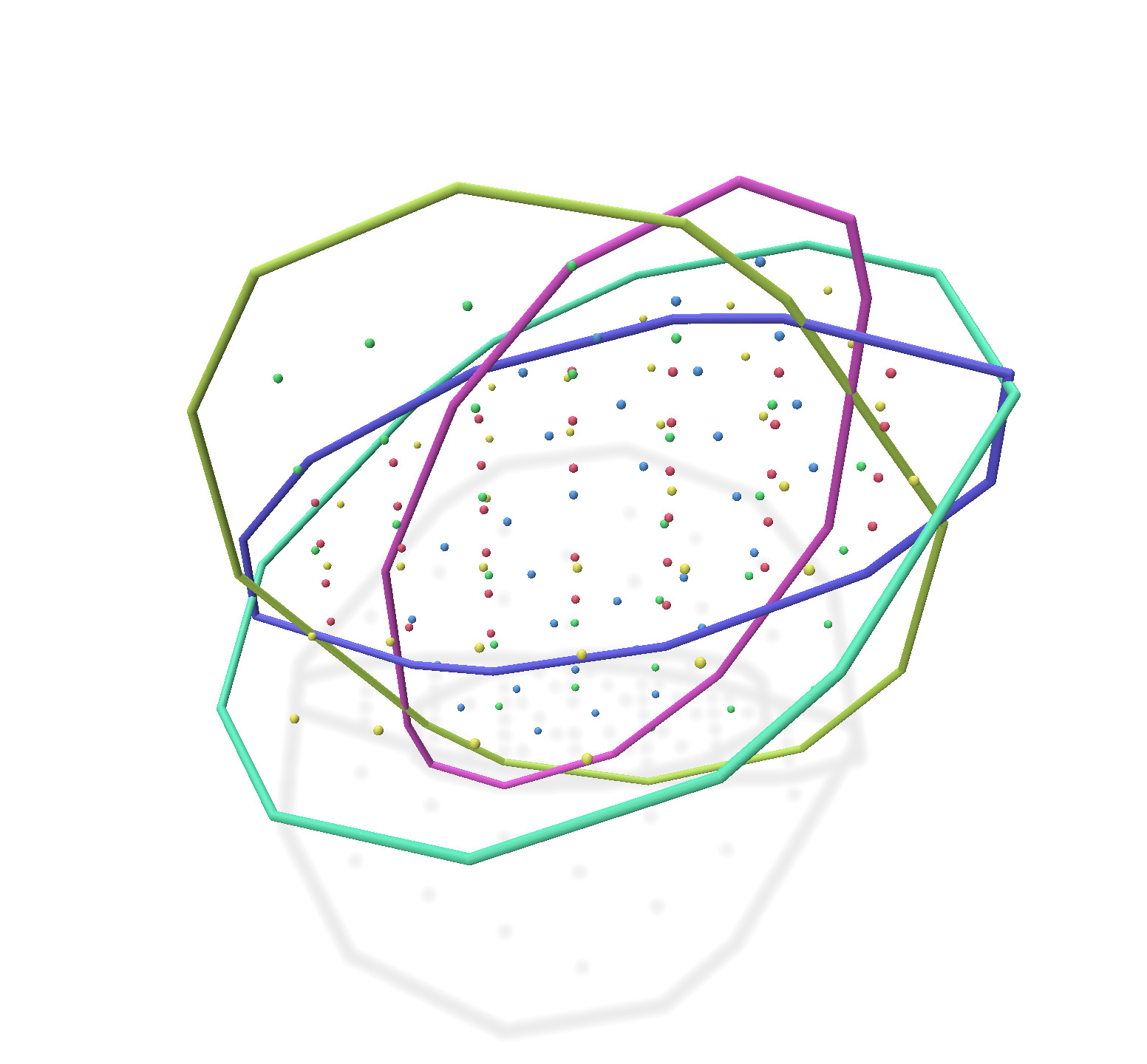
Convex hull of 100 4D points of affine dimension 2
- See also
- Further notes
#include <iostream>
#include <vector>
#include <random>
#include <algorithm>
#include <polyscope/polyscope.h>
#include <polyscope/surface_mesh.h>
#include <polyscope/point_cloud.h>
#include <polyscope/curve_network.h>
#include "DGtal/base/Common.h"
#include "DGtal/helpers/StdDefs.h"
#include "DGtal/geometry/tools/GenericLatticeConvexHull.h"
using namespace DGtal;
//Polyscope global
polyscope::PointCloud *psPoints[4];
polyscope::PointCloud *psVertices[4];
polyscope::PointCloud *psBoundary0[4];
polyscope::CurveNetwork *psBoundary1[4];
polyscope::SurfaceMesh *psBoundary2[4];
polyscope::Group *group[4];
std::random_device rd;
template < Dimension dim, typename TComponent, typename TContainer >
static
{
DGtal::PointVector< dim-1, TComponent, TContainer > pp;
Dimension l = 0;
if ( i != k ) pp[ l++ ] = p[ i ];
return pp;
}
template < Dimension dim, typename TComponent, typename TContainer >
static
std::vector< DGtal::PointVector< dim-1, TComponent, TContainer > >
const std::vector< DGtal::PointVector< dim, TComponent, TContainer > >& V )
{
std::vector< DGtal::PointVector< dim-1, TComponent, TContainer > > pV( V.size() );
for ( auto i = 0; i < pV.size(); i++ )
pV[ i ] = project( k, V[ i ] );
return pV;
}
template < typename Point >
static
std::vector< Point >
int nb, double radius, int amplitude, int aff_dim )
{
std::uniform_int_distribution<int> U(-amplitude, amplitude);
std::vector< Point > P;
int m = std::min( aff_dim, (int) V.size() );
for ( auto k = 0; P.size() < nb && k < 100000; k++ )
{
for ( auto i = 0; i < m; i++ )
{
int l = U( g );
B += l * V[ i ];
}
P.push_back( B );
}
std::shuffle( P.begin(), P.end(), g );
return P;
}
{
typedef Space::Point Point4;
std::cout << "Usage: " << argv[ 0 ] << " [R=30] [N=30] [D=2]\n";
std::cout << "Computes the convex hull of N 4D points within a ball of radius R, these points belonging to a lattice of chosen dimension 0<=D<=3. The output is projected along the 4 canonic projections onto 3D space. You cannot choose D=4 since we cannot display the result in 3D.\n";
double radius = argc > 1 ? atof( argv[ 1 ] ) : 30.0;
int nb = argc > 2 ? atoi( argv[ 2 ] ) : 30;
int adim = argc > 3 ? atoi( argv[ 3 ] ) : 2;
if ( nb < 0 ) return 1;
if ( adim < 0 || adim > 3 ) return 1;
// Create points
std::vector< Point4 > L = { Point4{ 4, 1, -3, 1 },
Point4{ 0, 2, 5, -1 },
Point4{ -1, -3, 5, 0 },
Point4{ 2, 0, 3, -3 } };
std::vector< Point4 > X
= makeRandomLatticePointsFromDirVectors( Point4(1,2,-1,0),
L, nb,
radius,
int( round( radius+0.5 ) ),
adim );
// Compute convex hull
QHull hull;
bool ok = hull.compute( X );
std:: cout << ( ok ? "[PASSED]" : "[FAILED]" ) << " hull=" << hull << "\n";
// Initialize polyscope
polyscope::init();
std::string proj[ 4 ] = { "(yzw)", "(xzw)", "(xyw)", "(xyz)" };
for ( Dimension k = 0; k < 4; k++ )
{
group [k] = polyscope::createGroup( proj[k] );
psPoints [k] = polyscope::registerPointCloud( proj[k]+" Points",
project( k, X ) );
psVertices[k] = polyscope::registerPointCloud( proj[k]+" Vertices",
project( k, hull.positions ) );
psPoints [k]->addToGroup( proj[k] ); // add by name
psVertices[k]->addToGroup( proj[k] ); // add by name
if ( hull.affine_dimension <= 1 ) // 1 or 2 points
{
// no facets
psBoundary0[k] = polyscope::registerPointCloud( proj[k]+" Convex hull bdy dim=0",
project( k, hull.positions ) );
psBoundary0[k]->addToGroup( proj[k] ); // add by name
}
else if ( hull.affine_dimension == 2 ) // 2D
{
// facets are edges (and implicitly converted by polyscope)
psBoundary1[k] = polyscope::registerCurveNetwork( proj[k]+" Convex hull bdy dim=1",
project( k, hull.positions ),
hull.facets );
psBoundary1[k]->addToGroup( proj[k] ); // add by name
}
else if ( hull.affine_dimension == 3 ) // 3D
{
// facets are polygons
psBoundary2[k] = polyscope::registerSurfaceMesh( proj[k]+" Convex hull bdy dim=2",
project( k, hull.positions ),
hull.facets );
psBoundary2[k]->addToGroup( proj[k] ); // add by name
}
}
polyscope::show();
return EXIT_SUCCESS;
}
void project(ProjectedPoint &pp, const Point &p, Dimension a)
Definition checkFullConvexityTheorems.cpp:71
Definition testPartialTemplateSpecialization.cpp:63
Aim: Implements basic operations that will be used in Point and Vector classes.
Definition PointVector.h:593
Definition SpaceND.h:96
Definition testClone2.cpp:346
DGtal is the top-level namespace which contains all DGtal functions and types.
Definition ClosedIntegerHalfPlane.h:49
Definition testCountedConstPtrOrConstPtr.cpp:43
Aim: Implements the quickhull algorithm by Barber et al. , a famous arbitrary dimensional convex hull...
Definition GenericLatticeConvexHull.h:522
std::mt19937 g(rd())
std::vector< Point > makeRandomLatticePointsFromDirVectors(int nb, const vector< Point > &V)
Definition testAffineBasis.cpp:66