Loading...
Searching...
No Matches
geometry/volumes/distance/voronoimap2D.cpp
Example of a Voronoi map construction in dimension 2 for the Euclidean metric.
- See also
- Digital Voronoi Diagram Computation
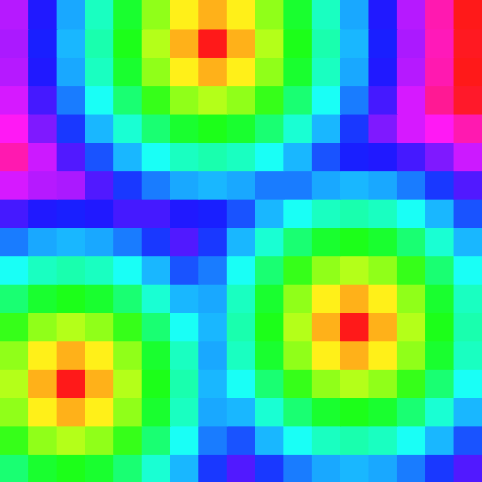 Distance transformation for the l_2 metric.
Distance transformation for the l_2 metric.
#include <iostream>
#include "DGtal/base/Common.h"
#include "DGtal/helpers/StdDefs.h"
#include "DGtal/kernel/BasicPointPredicates.h"
#include "DGtal/images/SimpleThresholdForegroundPredicate.h"
#include "DGtal/geometry/volumes/distance/ExactPredicateLpSeparableMetric.h"
#include "DGtal/geometry/volumes/distance/VoronoiMap.h"
#include "DGtal/geometry/volumes/distance/DistanceTransformation.h"
#include "DGtal/io/colormaps/HueShadeColorMap.h"
#include "DGtal/io/boards/Board2D.h"
using namespace std;
using namespace DGtal;
using namespace DGtal::functors;
{
L2Metric l2;
set.insertNew(Z2i::Point(7,15));
set.insertNew(Z2i::Point(12,5));
Board2D board;
board<< domain << set;
NotPredicate notSetPred(set);
Voronoi2D voronoimap(domain,notSetPred,l2);
board.clear();
board << domain;
for(Voronoi2D::Domain::ConstIterator it = voronoimap.domain().begin(),
itend = voronoimap.domain().end(); it != itend; ++it)
{
Voronoi2D::Value site = voronoimap( *it ); //closest site to (*it)
if (site != (*it))
Display2DFactory::draw( board, site - (*it), (*it)); //Draw an arrow
}
board.saveSVG("voronoimap-voro.svg");
board.clear();
for(Voronoi2D::Domain::ConstIterator it = voronoimap.domain().begin(),
itend = voronoimap.domain().end(); it != itend; ++it)
{
Voronoi2D::Value site = voronoimap( *it ); //closest site to (*it)
unsigned char c = (site[1]*13 + site[0] * 7) % 256; //basic hashfunction
<< (*it);
}
board.saveSVG("voronoimap-cells.svg");
typedef ExactPredicateLpSeparableMetric<Z2i::Space, 8> L8Metric;
L8Metric l8;
typedef VoronoiMap<Z2i::Space, NotPredicate, L8Metric > Voronoi2D_l8;
Voronoi2D_l8 voronoimap_l8(domain,notSetPred,l8);
board.clear();
board << domain;
for(Voronoi2D_l8::Domain::ConstIterator it = voronoimap_l8.domain().begin(),
itend = voronoimap_l8.domain().end(); it != itend; ++it)
{
Voronoi2D::Value site = voronoimap_l8( *it ); //closest site to (*it)
unsigned char c = (site[1]*13 + site[0] * 7) % 256; //basic hashfunction
<< (*it);
}
board.saveSVG("voronoimap-vorol8.svg");
board.clear();
board << domain;
//Fast max computation on the range value
DT::Value maxDT=0.0;
it != itend ; ++it)
if ((*it)>maxDT) maxDT = (*it);
//Colormap
HueShadeColorMap<DT::Value,1> hueMap(0.0,maxDT);
//Drawing
for(DT::Domain::ConstIterator it = dt.domain().begin(),
itend = dt.domain().end(); it != itend; ++it)
{
DT::Value dist = dt( *it ); //distance to closest site to (*it)
<< (*it);
}
board.saveSVG("voronoimap-dt.svg");
trace.endBlock();
return 0;
}
// //
Aim: This class specializes a 'Board' class so as to display DGtal objects more naturally (with <<)....
Definition Board2D.h:71
Aim: A wrapper class around a STL associative container for storing sets of digital points within som...
Definition DigitalSetByAssociativeContainer.h:90
void insertNew(const Point &p)
Aim: Implementation of the linear in time distance transformation for separable metrics.
Definition DistanceTransformation.h:99
Aim: implements separable l_p metrics with exact predicates.
Definition ExactPredicateLpSeparableMetric.h:88
Aim: This class template may be used to (linearly) convert scalar values in a given range into a colo...
Definition HueShadeColorMap.h:91
void beginBlock(const std::string &keyword="")
double endBlock()
Aim: Implementation of the linear in time Voronoi map construction.
Definition VoronoiMap.h:127
void clear(const DGtal::Color &color=DGtal::Color::None)
Definition Board.cpp:151
void saveSVG(const char *filename, PageSize size=Board::BoundingBox, double margin=10.0) const
Definition Board.cpp:1011
DGtal is the top-level namespace which contains all DGtal functions and types.
Definition ClosedIntegerHalfPlane.h:49
STL namespace.
Custom style class redefining the pen color and the fill color. You may use Board2D::Color::None for ...
Definition Board2D.h:279
Definition Board2D.h:217
Aim: The predicate returns true when the point predicate given at construction return false....
Definition BasicPointPredicates.h:208