Table of Contents
- Since
- 1.4
Part of Shapes package
- See also
- examples/polyscope_examples/windingNumberShape.cpp, tests/shapes/testWindingNumberShape.cpp
This documentation describes the tool to construct a binary image from a set of oriented point clouds in \(\mathbb{R}^3\) using the generalized winding number framework of [10]. For short, from a collection of oriented points, the generalized winding number implicit function returns a scalar value at each point accounting for the number of turns of the (unknown) underling surface around that point. From [10], the implicit function for a point cloud \( \{(p_i,n_i)\}_{1..m}\) is approximated by
\[ w(q) = \sum_i^m a_i \frac{(p_i-q)\cdot n_i}{4\pi\|p_i -q\|^3} \]
where \( a_i\) is some area contribution of the point \( p_i\) to the surface (computed from the projection of the k-nearest neighbors to \( p_i\) onto the tangent plane at \( p_i \)). By thresholding the winding function with some values in \([0,1]\), we can define an iso-surface that approximates the exterior envelope of the shape defined by the oriented point cloud. For fast computations, we rely on the libigl of the generalized winding numbers.
- Warning
- This class requires to have LIBIGL, CGAL and cmake flags set to true (e.g.
cmake .. -DDGTAL_WITH_LIBIGL!true - DDGTAL_WITH_CGAL=true)
Basic usage
The core of the method is defined in the WindingNumberShape<Space> class. This class is a model of concepts::CEuclideanBoundedShape is the sense that once constructed, an object has an orientation( q ) method that returns the orientation (inside, outside or on) of q to the implicit surface (DGtal::Orientation).
As the WindingNumberShape class is a model of concepts::CEuclideanBoundedShape, the GaussDigitizer could be used (see Shapes, Shapers and Digitizers).
- Note
- Note that for each query, we have to traverse a hierarchical data structure containing the input points (roughly \(O(\log m)\) expected time for balanced trees).
Example:
| Input point cloud | Reconstruction h=2 | Reconstruction h=1 | Reconstruction h=0.2 |
|---|---|---|---|
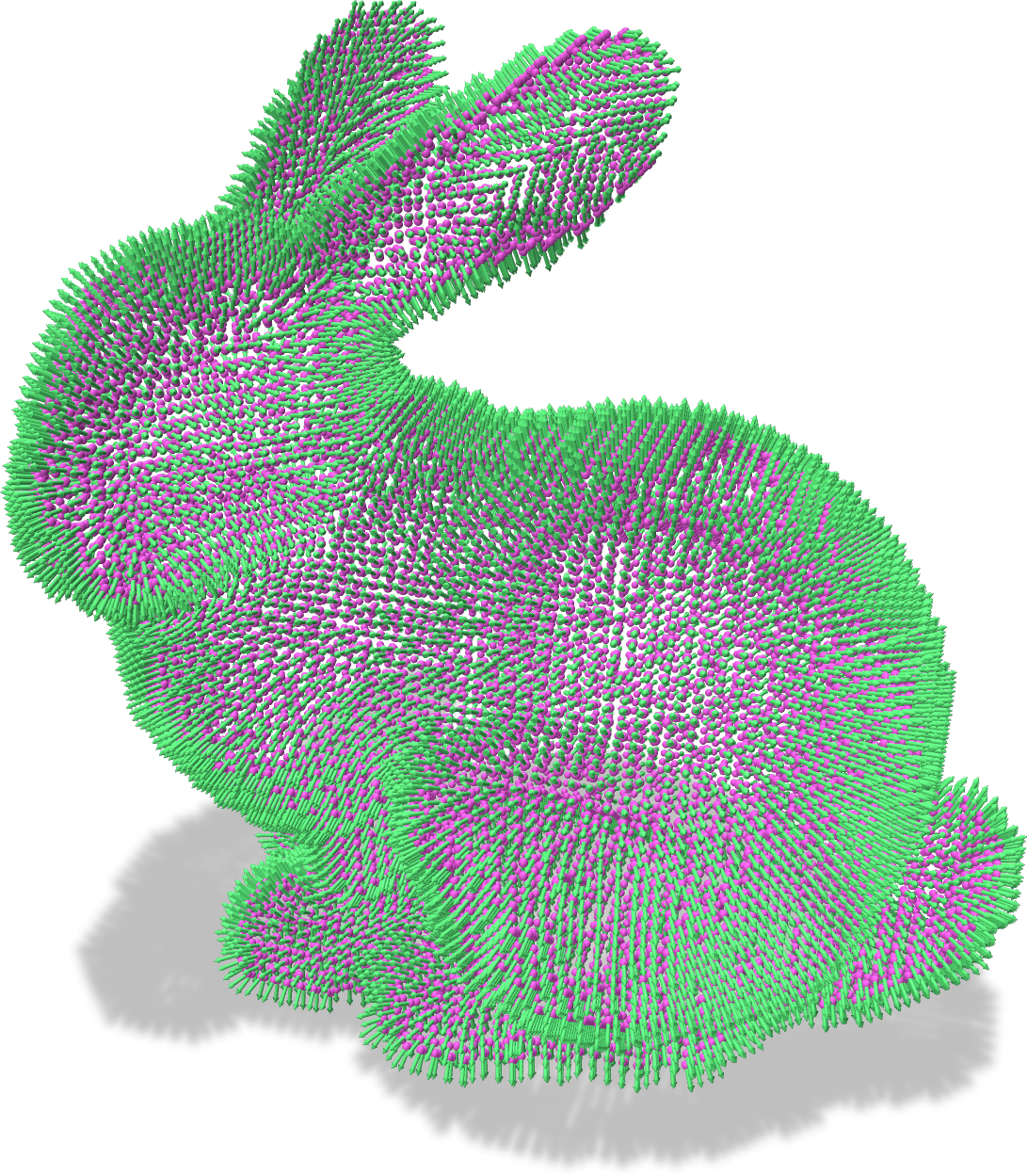
| 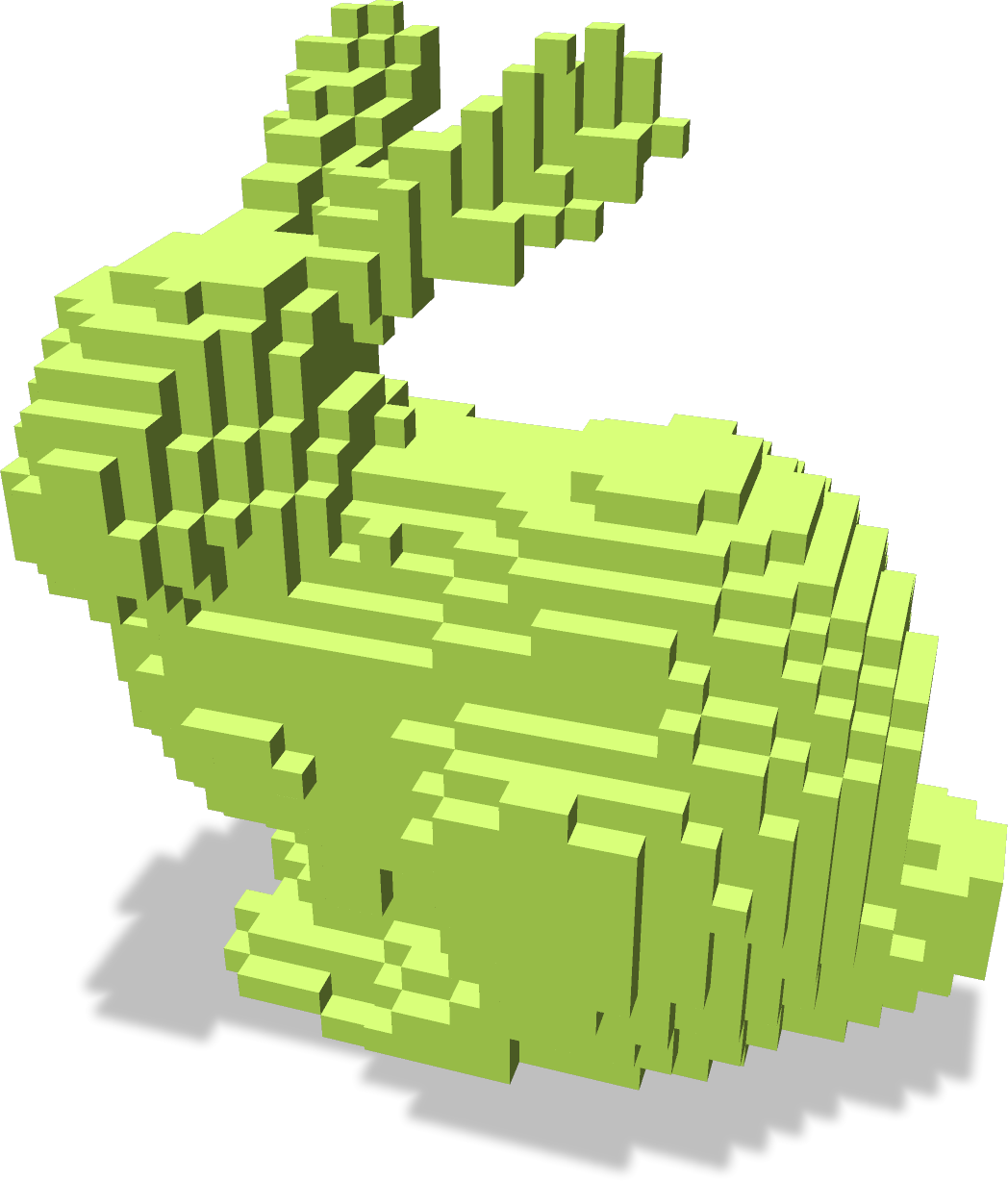
| 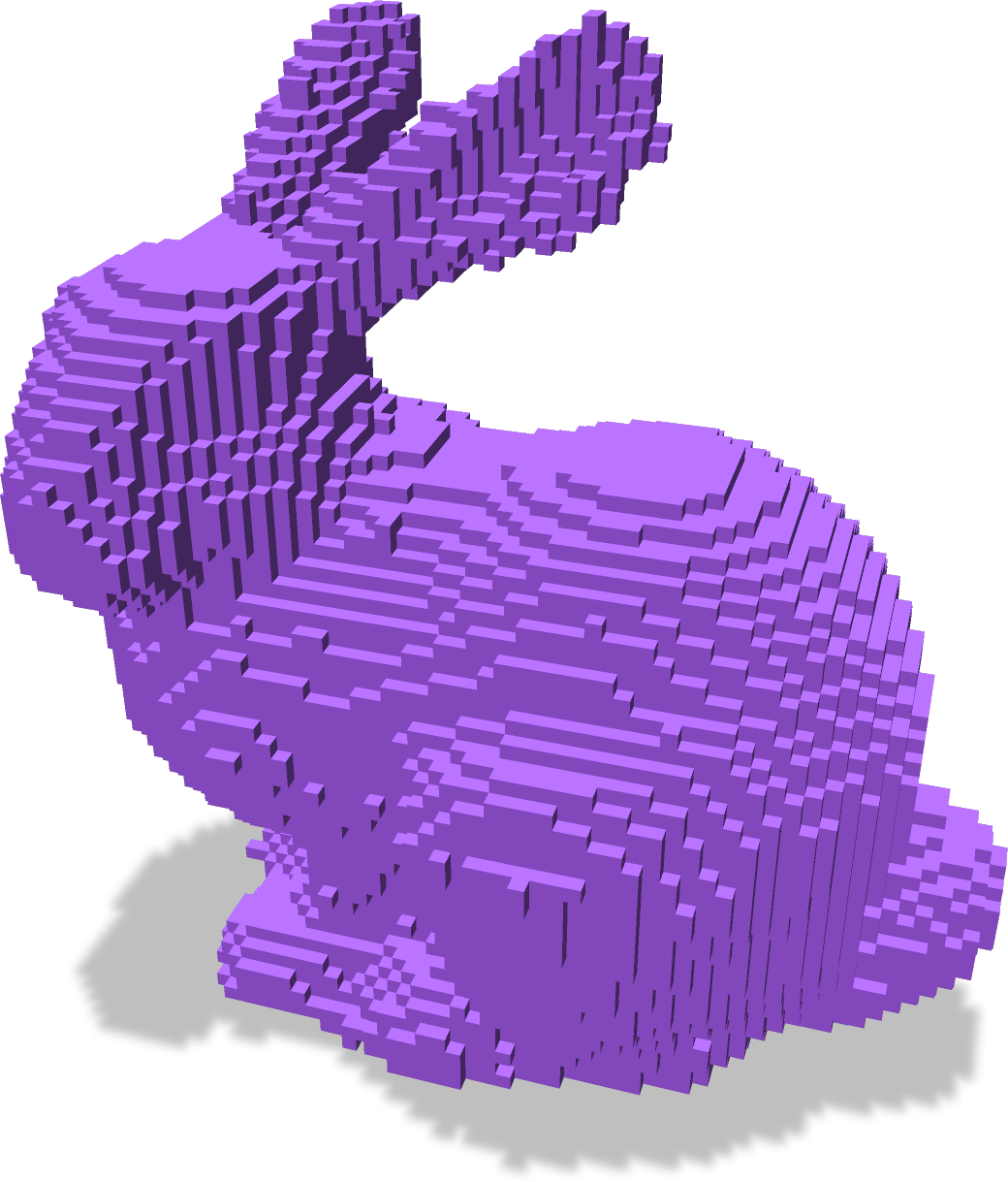
| 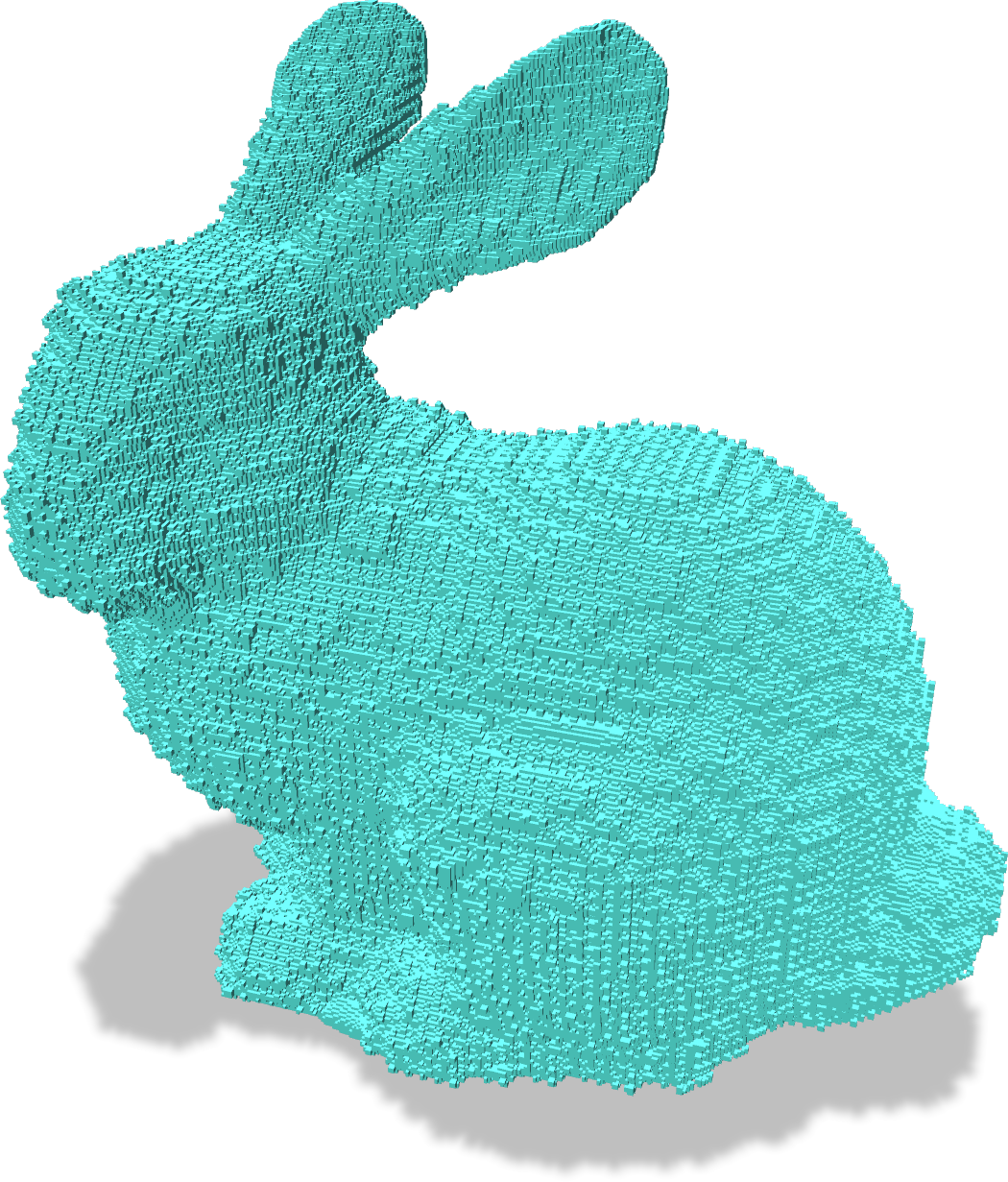
|
Advanced usages: batched queries and modified area measures
First, for multiple queries and to take advantage of the multithreading of the winding number backend:
The output vector contains the orientation of the query points in the same order.
At this point, we completely rely on libIGL and CGAL to estimate the \( a_i \) area measures. If the user wants to provide these quantities, the \(\{a_i\}\) can be prescribed at the constructor, or using the setAreaMeasure() method (with a skipPointAreas to true at the constructor).
- Note
- The orientation methods have a default thresholding parameter set to 0.3. Please check the class documentation for details.